
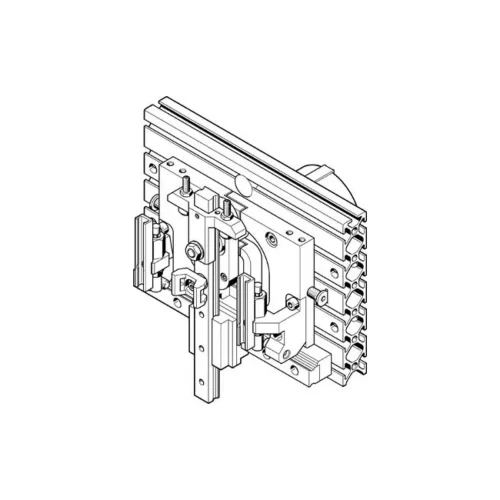
Description
Size 16 Y-stroke 90 mm … 110 mm Z-stroke 35 mm … 50 mm Z working stroke 20 mm Cushioning Pneumatic shock absorber at both ends Soft characteristic curve Mounting position Guide rail Vertical Mode of operation Double-acting Structural design Cross guide Swivel module Positively driven motion sequence Position sensing For proximity sensor Protection against torsion/guide Cross guide Operating pressure 4 bar … 8 bar Minimum cycle time 0.8 s Repetition accuracy ±0.01 mm Operating medium Compressed air as per iso 8573-1:2010 [7:-:-] Information on operating and pilot media Operation with oil lubrication possible (required for further use) Ambient temperature 0 °c … 60 °c Max. torque Mx dynamic 2.4 Nm Max. static moment Mx 10 Nm Max. torque My dynamic 2.4 Nm Max. static moment My 10 Nm Max. torque Mz dynamic 2.4 Nm Max. static moment Mz 10 Nm Max. payload 1 kg Theoretical force at 6 bar 50 N Product weight 4600 g Front unit mounting With through-hole Type of mounting With through-hole With slot nuts Pneumatic connection M5 Note on materials Free of copper and PTFE Base plate material Wrought aluminum alloy Cross guide material Tempered steel Side covers material Wrought aluminum alloy
Additional information
| series | Industrial Robots, Pick and Place Machines |
|---|
Related products




Kami adalah Invaltech.
Distributor and solution partner terbesar FESTO di South East Asia.